-
 嘉興沖網(wǎng)瑕疵檢測系統(tǒng)產(chǎn)品介紹
嘉興沖網(wǎng)瑕疵檢測系統(tǒng)產(chǎn)品介紹瑕疵檢測系統(tǒng)在企業(yè)的生產(chǎn)運營中發(fā)揮著極為重要的作用,能夠有效地幫助企業(yè)節(jié)省成本和時間。在成本節(jié)省方面,傳統(tǒng)的人工檢測往往需要雇傭大量的檢測人員,并且隨著人力成本的不斷攀升,這無疑是一筆不小的開支。而且人工檢測容易出現(xiàn)誤判和漏判,一旦有次品流入市場,可能引發(fā)客戶...
2024-12-16 -
 浙江傳送帶跑偏瑕疵檢測系統(tǒng)公司
浙江傳送帶跑偏瑕疵檢測系統(tǒng)公司瑕疵檢測系統(tǒng)對于提升產(chǎn)品的一致性和可靠性有著不可或缺的重要意義。產(chǎn)品的一致性是指在同一生產(chǎn)批次或不同批次之間,產(chǎn)品的質(zhì)量和性能特征保持相對穩(wěn)定和統(tǒng)一,就如同一個訓(xùn)練有素的合唱團(tuán),每個成員的表現(xiàn)都協(xié)調(diào)一致。瑕疵檢測系統(tǒng)在生產(chǎn)過程中對每一個產(chǎn)品進(jìn)行嚴(yán)格檢測,確保只...
2024-12-15 -
 北京線掃激光定制機器視覺檢測服務(wù)制造價格
北京線掃激光定制機器視覺檢測服務(wù)制造價格瑕疵檢測系統(tǒng)對于企業(yè)提高產(chǎn)品的競爭力有著極為關(guān)鍵的意義。在當(dāng)今全球化的市場競爭環(huán)境下,產(chǎn)品質(zhì)量是企業(yè)立足市場的根本。瑕疵檢測系統(tǒng)能夠確保企業(yè)產(chǎn)品的高質(zhì)量,使其在眾多競爭對手中脫穎而出。高質(zhì)量的產(chǎn)品能夠吸引更多的消費者購買,增加產(chǎn)品的市場份額。例如,在智能手機市...
2024-12-14 -
 浙江什么是智能草坪養(yǎng)護(hù)機器人公司
浙江什么是智能草坪養(yǎng)護(hù)機器人公司智能草坪養(yǎng)護(hù)機器人不僅具備與人工相似的操作能力,而且在智能化方面更勝一籌。相較于人工除草,智能草坪養(yǎng)護(hù)機器人的識別錯誤率極低。這得益于其內(nèi)部集成的先進(jìn)算法和精密傳感器,使其能夠準(zhǔn)確地區(qū)分草坪上的每一株植物,無論是目標(biāo)草種還是雜草,都能被精確識別并處理。因此,在...
2024-12-14 -
 天津智能智能草坪養(yǎng)護(hù)機器人按需定制
天津智能智能草坪養(yǎng)護(hù)機器人按需定制智能草坪養(yǎng)護(hù)機器人的自動化工作原理使得農(nóng)業(yè)工作者能夠從傳統(tǒng)、繁瑣且耗時的草坪養(yǎng)護(hù)工作中解脫出來。這種機器人集成了先進(jìn)的機器視覺、路徑規(guī)劃、目標(biāo)識別以及動作控制等技術(shù),可以自主完成草坪的巡視、雜草檢測、定位以及除草等一系列任務(wù)。通過自動化作業(yè),不僅提高了工作效率...
2024-12-13 -
浙江現(xiàn)代智能草坪養(yǎng)護(hù)機器人用途
智能草坪養(yǎng)護(hù)機器人的應(yīng)用在很大程度上減少了農(nóng)藥的大面積噴灑,從而有效避免了農(nóng)藥的浪費問題。傳統(tǒng)的草坪養(yǎng)護(hù)方法往往采用大面積噴灑農(nóng)藥的方式,這不僅浪費了大量的農(nóng)藥資源,還可能對環(huán)境和人體健康造成潛在威脅。而智能草坪養(yǎng)護(hù)機器人則通過精確識別雜草并對其進(jìn)行局部處理,...
2024-12-13 -
 榨菜包定制機器視覺檢測服務(wù)供應(yīng)商
榨菜包定制機器視覺檢測服務(wù)供應(yīng)商它是一門涉及光學(xué)、機械、計算機、模式識別、圖像處理、人工智能、信號處理以及光電一體化等多個領(lǐng)域的綜合性學(xué)科,其能以及應(yīng)用范圍隨著工業(yè)自動化的發(fā)展逐漸完善和推廣,其中母子圖像傳感器、CMOS和CCD攝像機、DSP、ARM嵌入式技術(shù)、圖像處理和模式識別等技術(shù)的快速...
2024-12-12 -
 山東傳送帶跑偏定制機器視覺檢測服務(wù)私人定做
山東傳送帶跑偏定制機器視覺檢測服務(wù)私人定做其能以及應(yīng)用范圍隨著工業(yè)自動化的發(fā)展逐漸完善和推廣,其中母子圖像傳感器、CMOS和CCD攝像機、DSP、ARM嵌入式技術(shù)、圖像處理和模式識別等技術(shù)的快速發(fā)展,有力地推動了機器視覺的發(fā)展。機器視覺是一種比較復(fù)雜的系統(tǒng)。因為大多數(shù)系統(tǒng)監(jiān)控對象都是運動物體,系統(tǒng)與運...
2024-12-11 -
 上海篦冷機工況定制機器視覺檢測服務(wù)案例
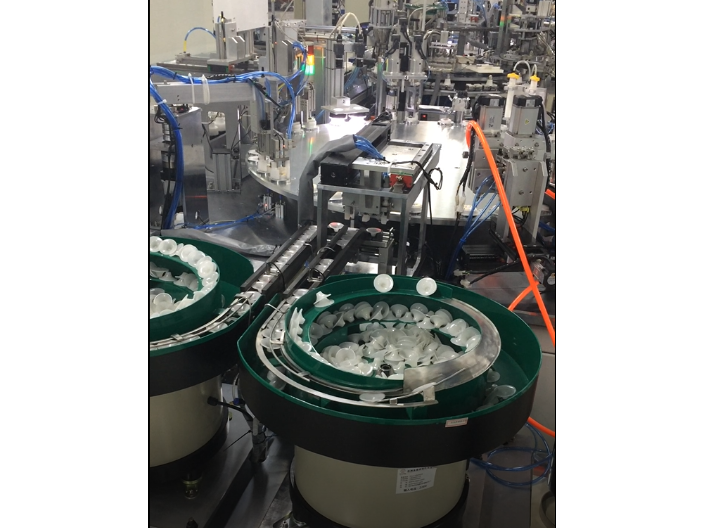
上海篦冷機工況定制機器視覺檢測服務(wù)案例南京熙岳智能科技有限公司利用機器視覺檢測系統(tǒng)檢測瓶蓋,采用振蕩進(jìn)料方式,對藥用瓶蓋的正反面、內(nèi)部、側(cè)面360度進(jìn)行檢測。可檢臟污、商標(biāo)錯、白道、色差、粘膠、內(nèi)蓋的壓六橋、反蓋、鋁材的缺料、水斑、壓邊、鉚偏、油污、擠傷、皺褶等缺陷,還可檢測出混蓋。針對不同產(chǎn)品快...
2024-12-11 -
 江蘇電池定制機器視覺檢測服務(wù)定制價格
江蘇電池定制機器視覺檢測服務(wù)定制價格其中,背向照明是被測物放在光源和攝像機之間,它的優(yōu)點是能獲得高對比度的圖像。前向照明是光源和攝像機位于被測物的同側(cè),這種方式便于安裝。結(jié)構(gòu)光照明是將光柵或線光源等投射到被測物上,根據(jù)它們產(chǎn)生的畸變,解調(diào)出被測物的三維信息。頻閃光照明是將高頻率的光脈沖照射到物體...
2024-12-10 -
 福建智能草坪養(yǎng)護(hù)機器人價格低
福建智能草坪養(yǎng)護(hù)機器人價格低農(nóng)林業(yè)采收機器人在進(jìn)行采收作業(yè)時,必須高度重視對農(nóng)作物植株的保護(hù),盡量避免在采收過程中對植株造成損傷。這是因為農(nóng)作物植株是農(nóng)業(yè)生產(chǎn)的基礎(chǔ),任何形式的損傷都可能對植株的生長和產(chǎn)量產(chǎn)生不良影響。破壞性的采收方式,如過度拉扯、粗暴摘取等,不僅可能導(dǎo)致植株受傷,還可能...
2024-12-10 -
 北京節(jié)能智能采摘機器人解決方案
北京節(jié)能智能采摘機器人解決方案這款智能采摘機器人內(nèi)置了先進(jìn)的故障診斷與自修復(fù)系統(tǒng),為其長期穩(wěn)定運行提供了堅實的保障。在復(fù)雜的果園作業(yè)環(huán)境中,機器人可能會遇到各種突發(fā)情況與潛在故障,如傳感器異常、機械臂卡頓、電池電量不足等。針對這些問題,機器人的故障診斷系統(tǒng)能夠?qū)崟r監(jiān)測各項關(guān)鍵參數(shù)與性能指標(biāo)...
2024-12-09 -
吉林高爾夫球場智能草坪養(yǎng)護(hù)機器人私人定做
田間除草機器人是一種集成了環(huán)境感知、路徑規(guī)劃、目標(biāo)識別和動作控制于一體的先進(jìn)智能系統(tǒng)。它具備高度自主化的特點,能夠在田間復(fù)雜多變的環(huán)境中作業(yè)。通過搭載的各種傳感器和算法,機器人能夠?qū)崟r感知周圍環(huán)境的變化,如地形、植被分布等,并根據(jù)這些信息規(guī)劃出作業(yè)路徑。同時,...
2024-12-09 -
上海沖網(wǎng)定制機器視覺檢測服務(wù)價格
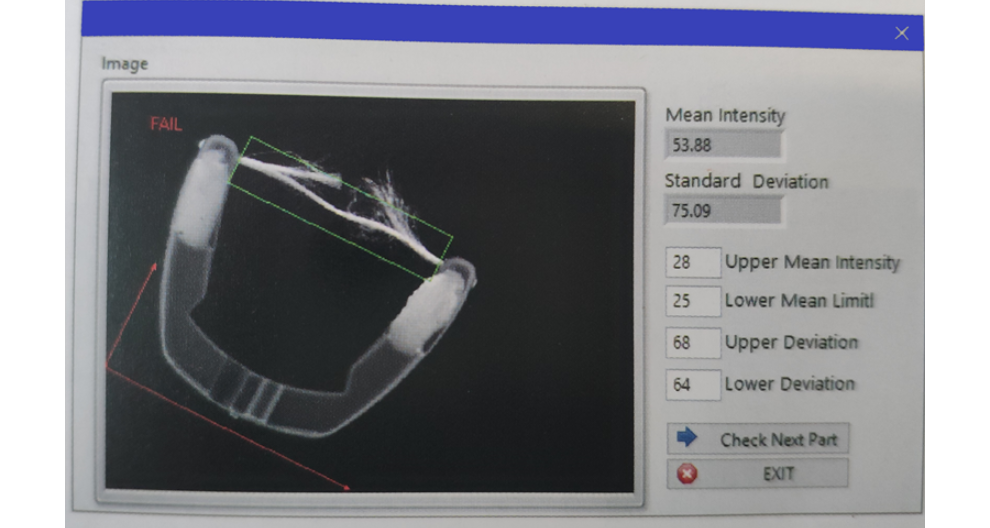
如果產(chǎn)品外表局部物理或化學(xué)性質(zhì)與其他區(qū)域有較大差別,對產(chǎn)品外觀、功能會造成巨大影響,如金屬表面的劃痕、斑點、孔洞,紙張表面的色差、壓痕,玻璃等非金屬表面的夾雜、破損、污點等等。表面缺陷不僅影響產(chǎn)品的美觀和舒適度,也會對其使用性能帶來不良影響,所以生產(chǎn)企業(yè)對產(chǎn)品...
2024-12-09 -
 北京榨菜包定制機器視覺檢測服務(wù)功能
北京榨菜包定制機器視覺檢測服務(wù)功能南京熙岳智能科技金屬板如大型電力變壓器線圈扁平線收音機朦朧皮等的表面質(zhì)量都有很高的要求,但原始的采用人工目視或用百分表加控針的檢測方法不僅易受主觀因素的影響,而且可能會繪被測表面帶來新的劃傷。金屬板表面自動探傷系統(tǒng)利用機器視覺技術(shù)對金屬表面缺陷進(jìn)行自動檢查,在...
2024-12-08 -
 北京自動智能采摘機器人品牌
北京自動智能采摘機器人品牌在智能采摘機器人的工作過程中,其展現(xiàn)出的高度智能化與自適應(yīng)能力令人矚目。尤其是在面對果園中形態(tài)各異、大小不一的果實時,機器人能夠憑借內(nèi)置的精密傳感器與先進(jìn)的算法系統(tǒng),實現(xiàn)對果實大小、形狀等特征的即時感知與精確分析。基于這一實時數(shù)據(jù),機器人會自動調(diào)整其采摘力度,...
2024-12-08 -
 浙江現(xiàn)代智能采摘機器人趨勢
浙江現(xiàn)代智能采摘機器人趨勢智能采摘機器人以其適應(yīng)性設(shè)計,展現(xiàn)出了對多種類、多規(guī)模果園的兼容性。無論是種植蘋果、橙子還是葡萄等不同種類的果園,機器人都能憑借其先進(jìn)的機器視覺與識別技術(shù),精細(xì)識別并采摘目標(biāo)果實,確保作業(yè)的高效與準(zhǔn)確。同時,其靈活的機械臂與智能控制系統(tǒng)也賦予了機器人處理不同大...
2024-12-08 -
 重慶草坪智能草坪養(yǎng)護(hù)機器人售價
重慶草坪智能草坪養(yǎng)護(hù)機器人售價智能草坪養(yǎng)護(hù)機器人不僅工作效率極高,更值得一提的是,它具備一個明顯的優(yōu)勢,那就是能夠徹底將雜草去除干凈。相較于傳統(tǒng)的人工除草方式,智能草坪養(yǎng)護(hù)機器人通過先進(jìn)的視覺識別技術(shù)和精確的動作控制,能夠精確地識別并去除每一株雜草,不留死角。這種高效且徹底的除草方式,不僅...
2024-12-08 -
 上海什么是智能采摘機器人售價
上海什么是智能采摘機器人售價智能采摘機器人,作為現(xiàn)代農(nóng)業(yè)智能化轉(zhuǎn)型的先鋒,其技術(shù)之一便是通過集成的高清攝像頭與先進(jìn)的圖像識別技術(shù),實現(xiàn)了對果園中果實位置的精細(xì)定位。這些高清攝像頭,擁有極高的分辨率與色彩還原能力,能夠清晰捕捉果樹上的每一個細(xì)節(jié),無論是隱藏在茂密枝葉間的果實,還是懸掛于樹梢...
2024-12-08 -
安徽什么是智能采摘機器人私人定做
這款智能采摘機器人不僅是一個簡單的執(zhí)行工具,它還擁有著一顆不斷進(jìn)取、持續(xù)優(yōu)化的“智慧之心”。在于其內(nèi)置的強大學(xué)習(xí)機制,這是一種基于人工智能的深度學(xué)習(xí)能力,使得機器人能夠在每一次采摘作業(yè)中不斷積累經(jīng)驗、調(diào)整策略。在采摘過程中,機器人會實時收集關(guān)于果實位置、大小、...
2024-12-07 -
福建一種智能采摘機器人私人定做
這款智能采摘機器人在果園中的應(yīng)用,充分展現(xiàn)了其高度智能化的特點。它不僅能夠高效地完成采摘任務(wù),還能根據(jù)天氣、溫度等外部環(huán)境條件的變化,自動調(diào)整工作時間,確保采摘作業(yè)的順利進(jìn)行。機器人內(nèi)置了先進(jìn)的環(huán)境感知系統(tǒng),能夠?qū)崟r監(jiān)測果園內(nèi)的天氣狀況和溫度變化,并通過數(shù)據(jù)分...
2024-12-07 -
 江西梨智能采摘機器人價格低
江西梨智能采摘機器人價格低智能采摘機器人是現(xiàn)代農(nóng)業(yè)科技的一項重要成果,其技術(shù)之一就是機器視覺。這一技術(shù)使得機器人能夠精細(xì)地識別農(nóng)作物。具體來說,智能采摘機器人裝備了高分辨率的攝像頭和先進(jìn)的圖像處理算法,它們可以像人一樣“看到”農(nóng)田中的景象。當(dāng)機器人工作時,這些攝像頭會捕捉到農(nóng)田的圖像,...
2024-12-07 -
河南智能采摘機器人性能
這款智能采摘機器人在面對果園中復(fù)雜多變的地形和惡劣環(huán)境時,展現(xiàn)出了令人矚目的適應(yīng)能力。其設(shè)計充分考慮了果園的實際情況,采用了堅固耐用的材料和先進(jìn)的機械結(jié)構(gòu),確保機器人能夠在泥濘、坑洼、斜坡等復(fù)雜地形中穩(wěn)定行走,不受地面條件限制。同時,機器人還配備了防水、防塵等...
2024-12-07 -
北京智能智能草坪養(yǎng)護(hù)機器人定制價格
智能草坪養(yǎng)護(hù)機器人就像是人工一般,甚至比人工更加智能和高效。這是因為智能草坪養(yǎng)護(hù)機器人集成了先進(jìn)的機器視覺、深度學(xué)習(xí)等技術(shù),能夠準(zhǔn)確識別草坪上的雜草和其他不需要的物體,避免了人工識別時可能出現(xiàn)的誤差和遺漏。相比傳統(tǒng)的人工除草方式,智能草坪養(yǎng)護(hù)機器人的識別錯誤率...
2024-12-07 -
 河南番茄智能采摘機器人按需定制
河南番茄智能采摘機器人按需定制這款智能采摘機器人不僅擁有強大的作業(yè)能力,還內(nèi)置了先進(jìn)的通訊模塊,使得它能夠輕松與果園內(nèi)的其他智能設(shè)備實現(xiàn)無縫對接和信息共享。通過這一通訊模塊,機器人能夠?qū)崟r與果園的灌溉系統(tǒng)、施肥系統(tǒng)、監(jiān)控系統(tǒng)等設(shè)備進(jìn)行數(shù)據(jù)交換,共享果園的土壤濕度、養(yǎng)分含量、病蟲害情況等關(guān)鍵...
2024-12-06 -
江蘇節(jié)能智能草坪養(yǎng)護(hù)機器人處理方法
智能草坪養(yǎng)護(hù)機器人,特別是田間除草機器人,是一個高度集成的智能系統(tǒng)。它不僅具備環(huán)境感知的能力,可以實時獲取并分析周圍環(huán)境的各種信息,如光照、溫度、濕度、土壤條件等;還具備路徑規(guī)劃的功能,能夠根據(jù)任務(wù)需求和環(huán)境信息,自主規(guī)劃出*優(yōu)的行動路徑。此外,它還能夠進(jìn)行目...
2024-12-06 -
 河南電池定制機器視覺檢測服務(wù)案例
河南電池定制機器視覺檢測服務(wù)案例瑕疵檢測系統(tǒng)運用光譜分析技術(shù)實現(xiàn)對產(chǎn)品表面的光譜檢測。光譜分析技術(shù)基于不同物質(zhì)對不同波長光的吸收、發(fā)射和散射特性。在檢測時,系統(tǒng)會向產(chǎn)品表面發(fā)射一束包含多種波長的光,然后收集反射回來的光并進(jìn)行光譜分析。例如在檢測寶石、涂料等產(chǎn)品時,如果產(chǎn)品表面存在雜質(zhì)、顏色不...
2024-12-06 -
山東自動智能采摘機器人售價
這款智能采摘機器人,在設(shè)計之初便融入了先進(jìn)的節(jié)能理念,通過一系列創(chuàng)新技術(shù)實現(xiàn)了能源的高效利用與長期續(xù)航。其動力系統(tǒng)采用了低能耗、高效率的電機與傳動裝置,能夠在保證強勁動力的同時,比較大限度地減少能量損耗。此外,機器人還配備了智能能源管理系統(tǒng),能夠?qū)崟r監(jiān)測電池狀...
2024-12-06 -
 海南梨智能采摘機器人價格
海南梨智能采摘機器人價格這款智能采摘機器人展現(xiàn)出了高度的環(huán)境適應(yīng)性與智能化管理能力。它能夠?qū)崟r接入氣象數(shù)據(jù)與果園內(nèi)部的微氣候監(jiān)測系統(tǒng),精確感知當(dāng)前的天氣狀況、溫度變化以及濕度、風(fēng)速等關(guān)鍵環(huán)境參數(shù)。基于這些精確的數(shù)據(jù),機器人能夠智能地評估當(dāng)前環(huán)境對采摘作業(yè)的影響,并據(jù)此自動調(diào)整工作時間...
2024-12-06 -
供應(yīng)智能采摘機器人用途
智能采摘機器人在設(shè)計之初就充分考慮到了果園環(huán)境的復(fù)雜性和多變性,因此內(nèi)置了多種高精度的傳感器,以實現(xiàn)對果園環(huán)境的實時監(jiān)測。這些傳感器包括但不限于溫濕度傳感器、光照強度傳感器、土壤濕度傳感器以及氣象預(yù)測傳感器等,它們各司其職,共同構(gòu)建起一個環(huán)境監(jiān)測網(wǎng)絡(luò)。通過這些...
2024-12-05